News
Feb 2026
CableRobotGraphSim accepted as an Oral at L4DC 2026 — preprint on arXiv.
2026
New paper on MPC of Tensegrity Robots via Contact-Aware GNN Dynamics submitted to IROS 2026.
2026
Tensegrity navigation paper accepted at IEEE Robotics and Automation Letters.
Sep 2025
Completed research internship at Dyna Robotics, working on VLA models and offline RL for robotic manipulation.
CoRL 2024
Paper on differentiable tensegrity dynamics with GNNs published at CoRL 2024 — arXiv:2410.12216.
Selected Publications
 🤖
🤖
N. Chen, P. Meng, C. Tang, A. Degay, Z. Brei, R. Kramer-Bottiglio, K. Bekris, & M. Aanjaneya
IROS 2026
Under Review
 🕸️
🕸️
N. Chen, W. R. Johnson, R. Kramer-Bottiglio, K. Bekris, & M. Aanjaneya
L4DC 2026
Oral
 🕸️
🕸️
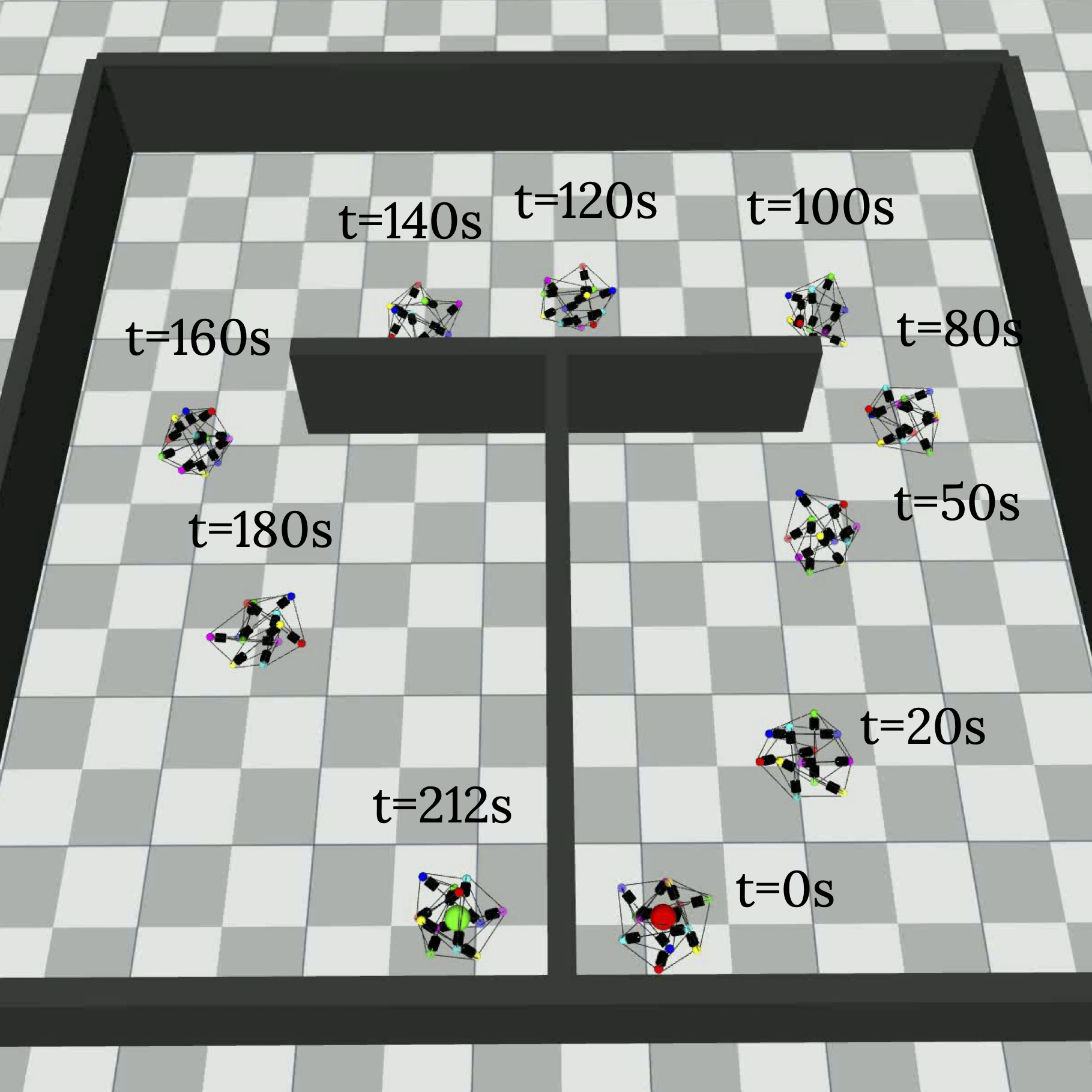
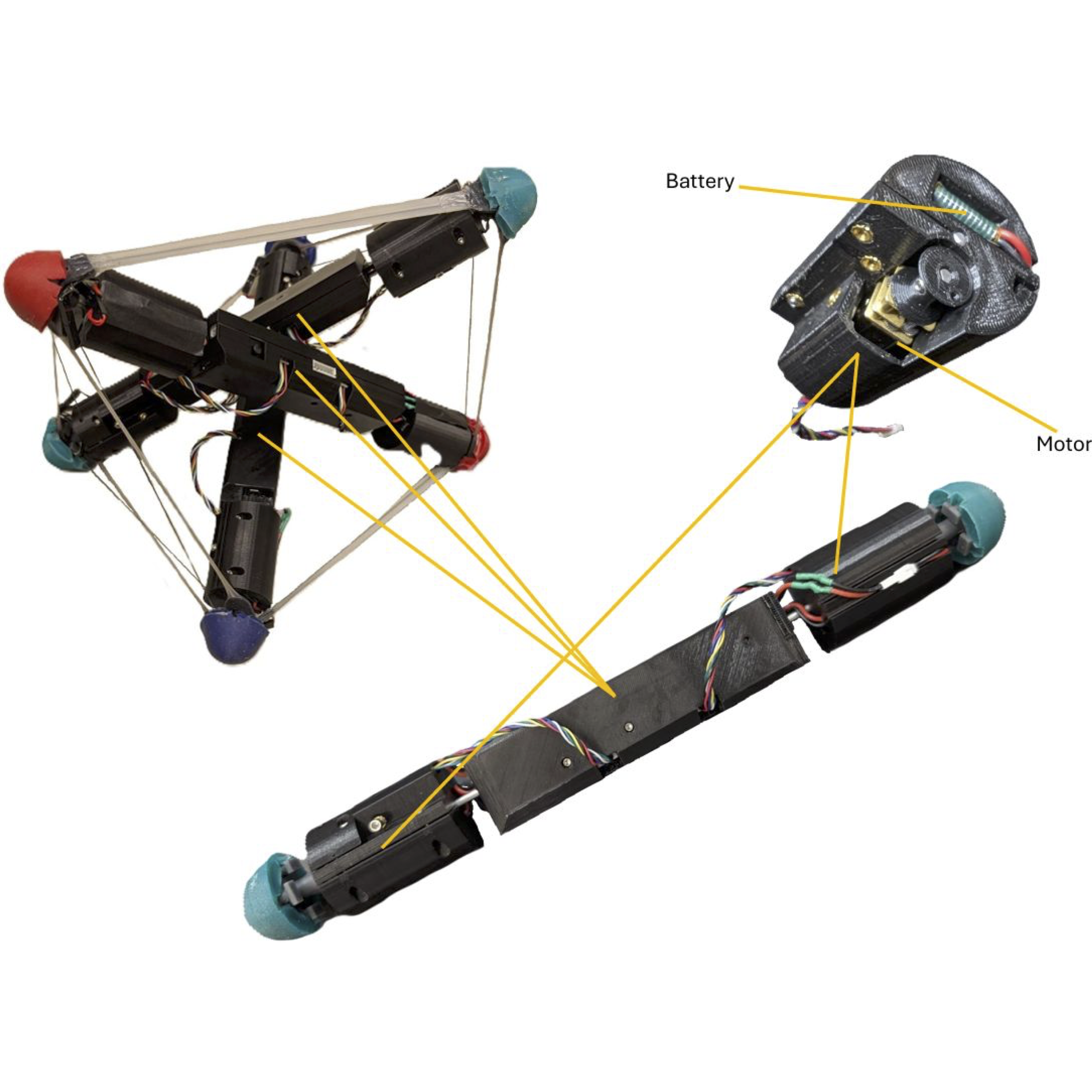
An Open-Source, Reproducible Tensegrity Robot that can Navigate Among Obstacles
W. R. Johnson*, P. Meng*, N. Chen, M. Aanjaneya, R. Kramer-Bottiglio, & K. Bekris
IEEE RA-L 2026
 🧠
🧠
N. Chen, K. Wang, W. R. Johnson, R. Kramer-Bottiglio, K. Bekris, & M. Aanjaneya
CoRL 2024
Experience
Built simulation infrastructure and training pipelines for Vision-Language-Action (VLA) benchmark models on LIBERO and Robomimic datasets using the internal DYNA-1 architecture. Developed dense learning-based reward functions and Q-functions for offline RL applied to towel-flattening manipulation.
Built Named-Entity-Recognition ensemble pipelines using Faster-RCNN, BERT, and LayoutLM to extract structured data chunks from insurance documents.
Led R&D to expand WorkFusion's AutoML framework; trained NLP-based data extraction models and a handwritten signature detector using object detection methods.
Education
Ph.D. in Computer Science (AI & Robotics)
Rutgers University, New Brunswick
2022 – 2027 (expected)
M.S. in Mechanical Engineering (Computational Fluid Dynamics)
University of California, Berkeley
2014 – 2016
B.S. in Mechanical Engineering
Northwestern University, Evanston
2010 – 2014
